Star polyhedron
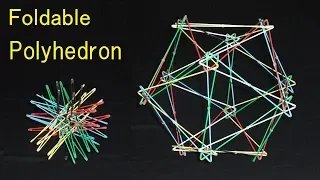
In geometry, a star polyhedron is a polyhedron which has some repetitive quality of nonconvexity giving it a star-like visual quality. There are two general kinds of star polyhedron: * Polyhedra which self-intersect in a repetitive way. * Concave polyhedra of a particular kind which alternate convex and concave or saddle vertices in a repetitive way. Mathematically these figures are examples of star domains. Mathematical studies of star polyhedra are usually concerned with regular, uniform polyhedra, or the duals of the uniform polyhedra. All these stars are of the self-intersecting kind. (Wikipedia).