
👉 Learn about polygons and how to classify them. A polygon is a plane shape bounded by a finite chain of straight lines. A polygon can be concave or convex and it can also be regular or irregular. A concave polygon is a polygon in which at least one of its interior angles is greater than 1
From playlist Classify Polygons
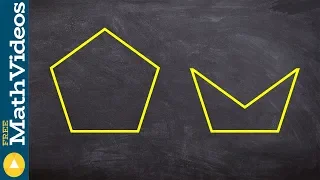
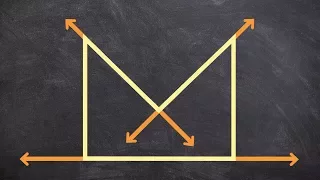
What is the difference between convex and concave polygons
👉 Learn about polygons and how to classify them. A polygon is a plane shape bounded by a finite chain of straight lines. A polygon can be concave or convex and it can also be regular or irregular. A concave polygon is a polygon in which at least one of its interior angles is greater than 1
From playlist Classify Polygons

What is the difference between convex and concave
👉 Learn about polygons and how to classify them. A polygon is a plane shape bounded by a finite chain of straight lines. A polygon can be concave or convex and it can also be regular or irregular. A concave polygon is a polygon in which at least one of its interior angles is greater than 1
From playlist Classify Polygons
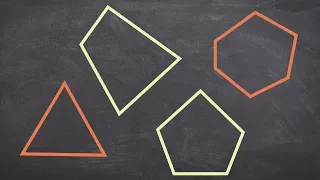
What are four types of polygons
👉 Learn about polygons and how to classify them. A polygon is a plane shape bounded by a finite chain of straight lines. A polygon can be concave or convex and it can also be regular or irregular. A concave polygon is a polygon in which at least one of its interior angles is greater than 1
From playlist Classify Polygons
👉 Learn about polygons and how to classify them. A polygon is a plane shape bounded by a finite chain of straight lines. A polygon can be concave or convex and it can also be regular or irregular. A concave polygon is a polygon in which at least one of its interior angles is greater than 1
From playlist Classify Polygons
What is the difference between a regular and irregular polygon
👉 Learn about polygons and how to classify them. A polygon is a plane shape bounded by a finite chain of straight lines. A polygon can be concave or convex and it can also be regular or irregular. A concave polygon is a polygon in which at least one of its interior angles is greater than 1
From playlist Classify Polygons

Tropical Geometry - Lecture 9 - Tropical Convexity | Bernd Sturmfels
Twelve lectures on Tropical Geometry by Bernd Sturmfels (Max Planck Institute for Mathematics in the Sciences | Leipzig, Germany) We recommend supplementing these lectures by reading the book "Introduction to Tropical Geometry" (Maclagan, Sturmfels - 2015 - American Mathematical Society)
From playlist Twelve Lectures on Tropical Geometry by Bernd Sturmfels

Spectrahedral lifts of convex sets – Rekha Thomas – ICM2018
Control Theory and Optimization Invited Lecture 16.6 Spectrahedral lifts of convex sets Rekha Thomas Abstract: Efficient representations of convex sets are of crucial importance for many algorithms that work with them. It is well-known that sometimes, a complicated convex set can be expr
From playlist Control Theory and Optimization

optimization and Tropical Combinatorics (Lecture 3) by Michael Joswig
PROGRAM COMBINATORIAL ALGEBRAIC GEOMETRY: TROPICAL AND REAL (HYBRID) ORGANIZERS Arvind Ayyer (IISc, India), Madhusudan Manjunath (IITB, India) and Pranav Pandit (ICTS-TIFR, India) DATE: 27 June 2022 to 08 July 2022 VENUE: Madhava Lecture Hall and Online Algebraic geometry is the study of
From playlist Combinatorial Algebraic Geometry: Tropical and Real (HYBRID)
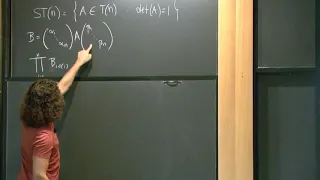
Introduction to geometric invariant theory 2: Moment polytopes - Michael Walter
Optimization, Complexity and Invariant Theory Topic: Introduction to geometric invariant theory 2: Moment polytopes Speaker: Michael Walter Affiliation: University of Amsterdam Date: June 5. 2018 For more videos, please visit http://video.ias.edu
From playlist Mathematics

Lecture 1 | Random polytopes | Zakhar Kabluchko | EIMI
Online school "Randomness online" November 4 – 8, 2020 https://indico.eimi.ru/event/40/
From playlist Talks of Mathematics Münster's reseachers
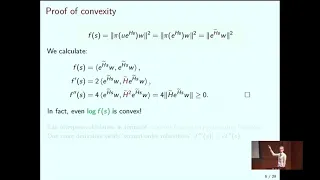
Towards a theory of non-commutative optimization...… -Rafael Oliveira
Computer Science/Discrete Mathematics Seminar I Topic: Towards a theory of non-commutative optimization: geodesic 1st and 2nd order methods for moment maps and polytopes Speaker: Rafael Oliveira Affiliation:University of Toronto Date: October 22, 2019 For more video please visit http://v
From playlist Mathematics

Ngoc Mai Tran: Tropical solutions to hard problems in auction theory, lecture IV
Tropical mathematics is mathematics done in the min-plus (or max-plus) algebra. The power of tropical mathematics comes from two key ideas: (a) tropical objects are limits of classical ones, and (b) the geometry of tropical objects is polyhedral. In this course, I’ll demonstrate how these
From playlist Summer School on modern directions in discrete optimization

Jelena Diakonikolas: Local Acceleration of Frank-Wolfe Methods
Conditional gradients (a.k.a. Frank-Wolfe) methods are the convex optimization methods of choice in settings where the feasible set is a convex polytope for which projections are expensive or even computationally intractable, but linear optimization can be implemented efficiently. Unlike p
From playlist Workshop: Continuous approaches to discrete optimization
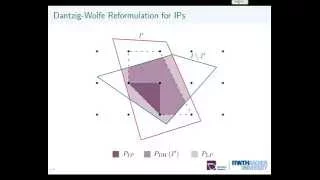
Jonas Witt: Dantzig Wolfe Reformulations for the Stable Set Problem
Dantzig-Wolfe reformulation of an integer program convexifies a subset of the constraints, which yields an extended formulation with a potentially stronger linear programming (LP) relaxation than the original formulation. This paper is part of an endeavor to understand the strength of such
From playlist HIM Lectures: Trimester Program "Combinatorial Optimization"

👉 Learn about polygons and how to classify them. A polygon is a plane shape bounded by a finite chain of straight lines. A polygon can be concave or convex and it can also be regular or irregular. A concave polygon is a polygon in which at least one of its interior angles is greater than 1
From playlist Classify Polygons

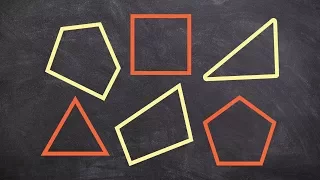
What are the names of different types of polygons based on the number of sides
👉 Learn about polygons and how to classify them. A polygon is a plane shape bounded by a finite chain of straight lines. A polygon can be concave or convex and it can also be regular or irregular. A concave polygon is a polygon in which at least one of its interior angles is greater than 1
From playlist Classify Polygons

What is the difference between concave and convex polygons
👉 Learn about polygons and how to classify them. A polygon is a plane shape bounded by a finite chain of straight lines. A polygon can be concave or convex and it can also be regular or irregular. A concave polygon is a polygon in which at least one of its interior angles is greater than 1
From playlist Classify Polygons
👉 Learn about polygons and how to classify them. A polygon is a plane shape bounded by a finite chain of straight lines. A polygon can be concave or convex and it can also be regular or irregular. A concave polygon is a polygon in which at least one of its interior angles is greater than 1
From playlist Classify Polygons
Thomas Eliot - undergraduate talk
Thomas Eliot delivers an undergraduate research talk at the Worldwide Center of Mathematics
From playlist Center of Math Research: the Worldwide Lecture Seminar Series