
In this video we cover the idea of marginal cost. This is simply the derivative of the cost function. We can roughly define marginal cost as the cost of producing one additional item. For more videos please visit http://www.mysecretmathtutor.com
From playlist Calculus


To have sound levels of self-esteem is one of the gateways to happiness. But achieving this has very little to do with the progress of our careers. If you like our films, take a look at our shop (we ship worldwide): https://goo.gl/1Uj9JM Watch more films on SELF: http://bit.ly/TSOLself P
From playlist SELF

Marginal value at risk (marginal VaR)
This is a review which follows Jorion's (Chapter 7) calculation of marginal value at risk (marginal VaR). Marginal VaR requires that we calculate the beta of a position with respect to the portfolio. For more financial risk videos, visit our website! http://www.bionicturtle.com
From playlist Value at Risk (VaR): Introduction

Reliability 1: External reliability and rater reliability and agreement
In this video, I discuss external reliability, inter- and intra-rater reliability, and rater agreement.
From playlist Reliability analysis

Unit 5 - practice problem 1 solution
From playlist Courses and Series

Stability Analysis, State Space - 3D visualization
Introduction to Stability and to State Space. Visualization of why real components of all eigenvalues must be negative for a system to be stable. My Patreon page is at https://www.patreon.com/EugeneK
From playlist Physics
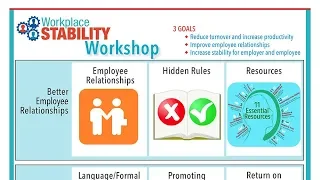
Workplace Stability at a Glance
Ruth Weirich describes the goals and components of the workshop Workplace Stability, which is based on her book of the same title. The book and workshop help employers and business owners provide supports to stabilize the lives of their low-wage and entry-level workers. Workplace Stabilit
From playlist Workplace Stability

Stability of Critical Points (Differential Equations 37)
Using Critical Points to determine increasing and decreasing of general solutions to differential equations.
From playlist Differential Equations
MIT Electronic Feedback Systems (1985) View the complete course: http://ocw.mit.edu/RES6-010S13 Instructor: James K. Roberge License: Creative Commons BY-NC-SA More information at http://ocw.mit.edu/terms More courses at http://ocw.mit.edu
From playlist MIT Electronic Feedback Systems (1985)

Using Bode Plots, Part 3: Phase and Gain Margins
Get a Free Trial: https://goo.gl/C2Y9A5 Get Pricing Info: https://goo.gl/kDvGHt Ready to Buy: https://goo.gl/vsIeA5 Learn what gain margin and phase margins are and how to use them for control design in this MATLAB® Tech Talk by Carlos Osorio. Watch other MATLAB Tech Talk videos here: ht
From playlist Using Bode Plots
13. Operational Amplifier Compensation (continued)
MIT Electronic Feedback Systems (1985) View the complete course: http://ocw.mit.edu/RES6-010S13 Instructor: James K. Roberge License: Creative Commons BY-NC-SA More information at http://ocw.mit.edu/terms More courses at http://ocw.mit.edu
From playlist MIT Electronic Feedback Systems (1985)
What Is Robust Control? | Robust Control, Part 1
Watch the other videos in this series: Robust Control, Part 2: Understanding Disk Margin - https://youtu.be/XazdN6eZF80 Robust Control, Part 3: Disk Margins for MIMO Systems - https://youtu.be/sac_IYBjcq0 This videos covers a high-level introduction to robust control. The goal is to get
From playlist Robust Control

Control Bootcamp: Introduction to Robust Control
This video motivates robust control with the famous 1978 paper by John Doyle, titled "Guaranteed Margins for LQG Regulators"... Abstract: There are none. Code available at: faculty.washington.edu/sbrunton/control_bootcamp_code.zip These lectures follow Chapters 1 & 3 from: Machine le
From playlist Control Bootcamp

Four Legged Rovers | The future of space rover technolgy
The traditional wheeled rovers struggle hard on difficult surfaces. Here comes the use of the latest rover technology developed by Spacebit ― A legged rover named Asagumo. These rovers can move individual legs to specific spots and can also tilt their bodies. Let’s understand this latest s
From playlist Robotics

The Vortex Ansatz as a Fertile Testing Ground for Certain Systems of PDEs by Vamsi Pingali
PROGRAM: VORTEX MODULI ORGANIZERS: Nuno Romão (University of Augsburg, Germany) and Sushmita Venugopalan (IMSc, India) DATE & TIME: 06 February 2023 to 17 February 2023 VENUE: Ramanujan Lecture Hall, ICTS Bengaluru For a long time, the vortex equations and their associated self-dual fie
From playlist Vortex Moduli - 2023

MIT Electronic Feedback Systems (1985) View the complete course: http://ocw.mit.edu/RES6-010S13 Instructor: James K. Roberge License: Creative Commons BY-NC-SA More information at http://ocw.mit.edu/terms More courses at http://ocw.mit.edu
From playlist MIT Electronic Feedback Systems (1985)

Wall Crossing, Part 3 - Greg Moore
Wall Crossing, Part 3 Greg Moore Rutgers, The State University of New Jersey July 29, 2010
From playlist PiTP 2010

Equilibrium Solutions and Stability of Differential Equations (Differential Equations 36)
https://www.patreon.com/ProfessorLeonard Exploring Equilibrium Solutions and how critical points relate to increasing and decreasing populations.
From playlist Differential Equations

Infinite-Dimensional Geometric Invariant Theory and Gauged Gromov–Witten... by Dan Halpern-Leistner
PROGRAM: VORTEX MODULI ORGANIZERS: Nuno Romão (University of Augsburg, Germany) and Sushmita Venugopalan (IMSc, India) DATE & TIME: 06 February 2023 to 17 February 2023 VENUE: Ramanujan Lecture Hall, ICTS Bengaluru For a long time, the vortex equations and their associated self-dual fie
From playlist Vortex Moduli - 2023