Geometric algorithms | Types of polygons
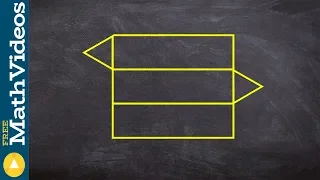
Monotone polygon
In geometry, a polygon P in the plane is called monotone with respect to a straight line L, if every line orthogonal to L intersects the boundary of P at most twice. Similarly, a polygonal chain C is called monotone with respect to a straight line L, if every line orthogonal to L intersects C at most once. For many practical purposes this definition may be extended to allow cases when some edges of P are orthogonal to L, and a simple polygon may be called monotone if a line segment that connects two points in P and is orthogonal to L lies completely in P. Following the terminology for monotone functions, the former definition describes polygons strictly monotone with respect to L. (Wikipedia).