
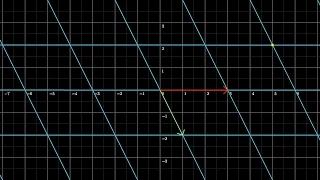
Linear Algebra 21a: Rigid Transformations
https://bit.ly/PavelPatreon https://lem.ma/LA - Linear Algebra on Lemma http://bit.ly/ITCYTNew - Dr. Grinfeld's Tensor Calculus textbook https://lem.ma/prep - Complete SAT Math Prep
From playlist Part 3 Linear Algebra: Linear Transformations
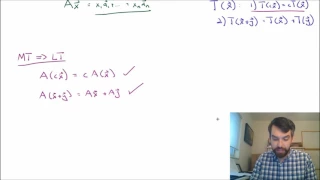
Matrix Transformations are the same thing as Linear Transformations
Learning Objectives: 1) Recall the defining properties of Matrix-vector product and of Linear Transformations 2) Apply algebraic rules to deduce that Matrix transformations are Linear transformations 3) Prove that Linear Transformations are Matrix transformations by writing a vector as a l
From playlist Linear Algebra (Full Course)

Elastic Deformation and Plastic Deformation | Mechanical Properties of Solids | Don't Memorise
Deformation is simply a change in the shape of a body caused by a Force. But what can be Elastic Deformation and Plastic Deformations? (Mechanical Properties of Solids) We know that when a Spring is Stretched or Compressed it goes back to original shape when released. Why is that? what i
From playlist Physics
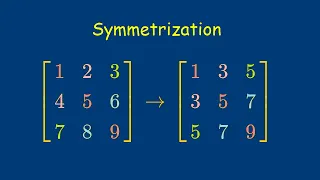
In this video, I define a cool operation called the symmetrization, which turns any matrix into a symmetric matrix. Along the way, I also explain how to show that an (abstract) linear transformation is one-to-one and onto. Finally, I show how to decompose and matrix in a nice way, sort of
From playlist Linear Transformations

2.2.2 What is a linear transformation?
2.2.2 What is a linear transformation?
From playlist LAFF - Week 2
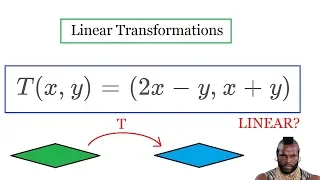
Showing something is a linear transformation Check out my Linear Equations playlist: https://www.youtube.com/playlist?list=PLJb1qAQIrmmD_u31hoZ1D335sSKMvVQ90 Subscribe to my channel: https://www.youtube.com/channel/UCoOjTxz-u5zU0W38zMkQIFw
From playlist Linear Transformations
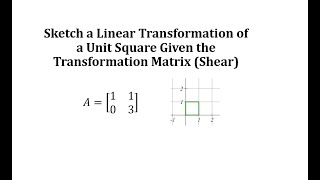
Sketch a Linear Transformation of a Unit Square Given the Transformation Matrix (Shear)
This video explains 2 ways to graph a linear transformation of a unit square on the coordinate plane.
From playlist Matrix (Linear) Transformations
Linear Algebra 20a: Introduction to Transformations (Mostly Linear) in the Plane and in the 3D Space
https://bit.ly/PavelPatreon https://lem.ma/LA - Linear Algebra on Lemma http://bit.ly/ITCYTNew - Dr. Grinfeld's Tensor Calculus textbook https://lem.ma/prep - Complete SAT Math Prep
From playlist Part 3 Linear Algebra: Linear Transformations

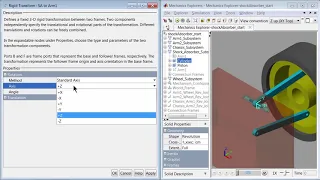
Physical Modeling Tutorial, Part 8: Building Mechanical Assemblies Part 1
Learn to create an assembly in Simscape Multibody. You’ll see how to implement coordinate transforms, represent degrees of freedom, and specify body interfaces for reusability. - Enter the MATLAB and Simulink Racing Lounge: http://bit.ly/2HhcXnU - Download Example Files: Physical Modelin
From playlist Physical Modeling Tutorials

Jacob Linder: 15.02.12, Classical Mechanics (TFY4345), v2012 NTNU A full textbook covering the material in the lectures in detail can be downloaded for free here: http://bookboon.com/en/introduction-to-lagrangian-hamiltonian-mechanics-ebook
From playlist NTNU: TFY 4345 - Classical Mechanics | CosmoLearning Physics
Introduction to transformations | Transformations | Geometry | Khan Academy
Introduction to transformations Practice this lesson yourself on KhanAcademy.org right now: https://www.khanacademy.org/math/geometry/transformations/rigid-transformations-intro/e/performing-translations-on-the-coordinate-plane?utm_source=YT&utm_medium=Desc&utm_campaign=Geometry Watch t
From playlist High School Geometry | High School Math | Khan Academy
Physical Modeling Tutorial, Part 9: Building Mechanical Assemblies Part 2
We continue to build on the example from “Building Mechanical Assemblies Part 1” to show how to sense and log simulation results, add internal mechanics to joints, set initial conditions for mechanical configurations, actuate joints, and apply external force on parts. - Enter the MATLAB an
From playlist Physical Modeling Tutorials


Lecture 2 | Introduction to Robotics
Lecture by Professor Oussama Khatib for Introduction to Robotics (CS223A) in the Stanford Computer Science Department. Professor Khatib shows a video on Walking Machines then goes into his first topic -- Kinematics. CS223A is an introduction to robotics which covers topics such as Spati
From playlist Lecture Collection | Introduction to Robotics
Overview of functions stretching and shrinking - Online Tutor - Free Math Videos
👉 Learn how to determine the transformation of a function. Transformations can be horizontal or vertical, cause stretching or shrinking or be a reflection about an axis. You will see how to look at an equation or graph and determine the transformation. You will also learn how to graph a t
From playlist Characteristics of Functions
We discuss how "geometric transformations" (rotations, stretching, reflection) can be represented by matrices. We also briefly introduce the idea of "point matrices" and their application in computer graphics.
From playlist Mathematical Physics I Uploads

07 - Intuitive 3d Vector Math for Simulations
For the tutorial notes and the source html code and all other tutorials see https://matthias-research.github.io/pages/tenMinutePhysics/ I give an introduction to 3d vector math, the math that we need to write 3d simulations. In the compact presentation I focus on the part used in simulati
From playlist Theory