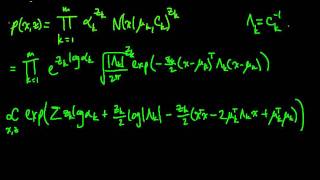
(ML 16.7) EM for the Gaussian mixture model (part 1)
Applying EM (Expectation-Maximization) to estimate the parameters of a Gaussian mixture model. Here we use the alternate formulation presented for (unconstrained) exponential families.
From playlist Machine Learning
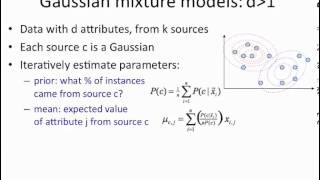
Mixture Models 4: multivariate Gaussians
Full lecture: http://bit.ly/EM-alg We generalise the equations for the case of a multivariate Gaussians. The main difference from the previous video (part 2) is that instead of a scalar variance we now estimate a covariance matrix, using the same posteriors as before.
From playlist Mixture Models
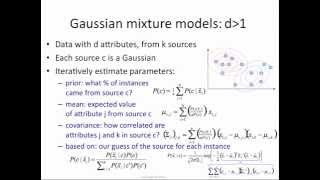
Mixture Models 3: multivariate Gaussians
Full lecture: http://bit.ly/EM-alg We generalise the equations for the case of a multivariate Gaussians. The main difference from the previous video (part 2) is that instead of a scalar variance we now estimate a covariance matrix, using the same posteriors as before.
From playlist Mixture Models

(ML 16.6) Gaussian mixture model (Mixture of Gaussians)
Introduction to the mixture of Gaussians, a.k.a. Gaussian mixture model (GMM). This is often used for density estimation and clustering.
From playlist Machine Learning
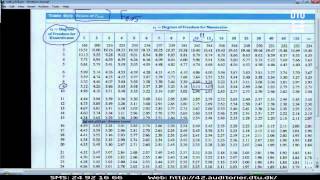
Lect.8G: Hypothesis Test For Two Variances, Example, R And The Numbers Of The Day Example
Example. Lecture with Per B. Brockhoff. Chapters: 00:00 - Example; 10:30 - Software R;
From playlist DTU: Introduction to Statistics | CosmoLearning.org

Multivariate Gaussian distributions
Properties of the multivariate Gaussian probability distribution
From playlist cs273a

(PP 6.3) Gaussian coordinates does not imply (multivariate) Gaussian
An example illustrating the fact that a vector of Gaussian random variables is not necessarily (multivariate) Gaussian.
From playlist Probability Theory

Michael Bertolacci - AdaptSPEC-X: Spectral analysis of multiple non stationary time series
Dr Michael Bertolacci (University of Wollongong) presents “AdaptSPEC-X: Spectral analysis of multiple non stationary time series”, 08/10/2020. Seminar organised by ANU.
From playlist Statistics Across Campuses

Robust and accurate inference via a mixture of Gaussian and terrors by Hyungsuk Tak
20 March 2017 to 25 March 2017 VENUE: Madhava Lecture Hall, ICTS, Bengaluru This joint program is co-sponsored by ICTS and SAMSI (as part of the SAMSI yearlong program on Astronomy; ASTRO). The primary goal of this program is to further enrich the international collaboration in the area
From playlist Time Series Analysis for Synoptic Surveys and Gravitational Wave Astronomy

From playlist Plenary talks One World Symposium 2020

Hypothesis Test: Two Population Proportions
This video explains how to conduct a hypothesis test on two population proportions. http://mathispower4u.com
From playlist Hypothesis Test with Two Samples

Pierre Vandekerkhove: Two-sample contamination model test
CONFERENCE Recording during the thematic meeting : "MLISTRAL" the September 27, 2022 at the Centre International de Rencontres Mathématiques (Marseille, France) Filmmaker: Guillaume Hennenfent Find this video and other talks given by worldwide mathematicians on CIRM's Audiovisual Mathem
From playlist Probability and Statistics

Ik Siong Heng - Gaussian Mixture Models for transient gravitational wave detection - IPAM at UCLA
Recorded 29 November 2021. Ik Siong Heng of the University of Glasgow prsents "Gaussian Mixture Models for transient gravitational wave detection" at IPAM's Workshop IV: Big Data in Multi-Messenger Astrophysics. Abstract: The data from the gravitational wave detectors are non-stationary an
From playlist Workshop: Big Data in Multi-Messenger Astrophysics

In this video we discuss the Gaussian (AKA Normal) probability distribution function. We show how it relates to the error function (erf) and discuss how to use this distribution analytically and numerically (for example when analyzing real-life sensor data or performing simulation of stoc
From playlist Probability
Efficiently Learning Mixtures of Gaussians - Ankur Moitra
Efficiently Learning Mixtures of Gaussians Ankur Moitra Massachusetts Institute of Technology January 18, 2011 Given data drawn from a mixture of multivariate Gaussians, a basic problem is to accurately estimate the mixture parameters. We provide a polynomial-time algorithm for this proble
From playlist Mathematics
Bayesian Modeling of Behavior (Tutorial) by Konrad Kording
PROGRAM ICTP-ICTS WINTER SCHOOL ON QUANTITATIVE SYSTEMS BIOLOGY (ONLINE) ORGANIZERS: Vijaykumar Krishnamurthy (ICTS-TIFR, India), Venkatesh N. Murthy (Harvard University, USA), Sharad Ramanathan (Harvard University, USA), Sanjay Sane (NCBS-TIFR, India) and Vatsala Thirumalai (NCBS-TIFR,
From playlist ICTP-ICTS Winter School on Quantitative Systems Biology (ONLINE)

Statistical Rethinking - Lecture 13
Lecture 13 - Generalized Linear Models (intro) - Statistical Rethinking: A Bayesian Course with R Examples
From playlist Statistical Rethinking Winter 2015

(ML 7.10) Posterior distribution for univariate Gaussian (part 2)
Computing the posterior distribution for the mean of the univariate Gaussian, with a Gaussian prior (assuming known prior mean, and known variances). The posterior is Gaussian, showing that the Gaussian is a conjugate prior for the mean of a Gaussian.
From playlist Machine Learning

Lecture 10B : Mixtures of Experts
Neural Networks for Machine Learning by Geoffrey Hinton [Coursera 2013] Lecture 10B : Mixtures of Experts
From playlist Neural Networks for Machine Learning by Professor Geoffrey Hinton [Complete]