
Open Gromov-Witten Invariants from the Fukaya Category - Kai Hugtenburg
Joint IAS/Princeton/Montreal/Paris/Tel-Aviv Symplectic Geometry Zoominar Topic: Open Gromov-Witten Invariants from the Fukaya Category Speaker: Kai Hugtenburg Affiliation: University of Edinburgh Date: February 10, 2023 Enumerative mirror symmetry is a correspondence between closed Grom
From playlist Mathematics
Jürg Kramer: Effective bounds for Faltings' delta function
In his seminal paper on arithmetic surfaces Faltings introduced a new invariant associated to compact Riemann surfaces. For a given compact Riemann surface X of genus g, this invariant is roughly given as minus the logarithm of the distance of the point in the moduli space of genus g curve
From playlist HIM Lectures: Junior Trimester Program "Algebraic Geometry"

Nessim Sibony: Unique ergodicity for foliations on compact Kähler surfaces
How to study the dynamics of a holomorphic polynomial vector field in $\mathbb{C}^{2}$? What is the replacement of invariant measure? I will survey some surprising rigidity results concerning the behavior of these dynamical system. It is helpful to consider the extension of this dynamical
From playlist Algebraic and Complex Geometry
Lagrangian Floer theory (Lecture – 02) by Sushmita Venugopalan
J-Holomorphic Curves and Gromov-Witten Invariants DATE:25 December 2017 to 04 January 2018 VENUE:Madhava Lecture Hall, ICTS, Bangalore Holomorphic curves are a central object of study in complex algebraic geometry. Such curves are meaningful even when the target has an almost complex stru
From playlist J-Holomorphic Curves and Gromov-Witten Invariants

Entropy production during free expansion of an ideal gas by Subhadip Chakraborti
Abstract: According to the second law, the entropy of an isolated system increases during its evolution from one equilibrium state to another. The free expansion of a gas, on removal of a partition in a box, is an example where we expect to see such an increase of entropy. The constructi
From playlist Seminar Series

Introduction to additive combinatorics lecture 5.8 --- Freiman homomorphisms and isomorphisms.
The notion of a Freiman homomorphism and the closely related notion of a Freiman isomorphism are fundamental concepts in additive combinatorics. Here I explain what they are and prove a lemma that states that a subset A of F_p^N such that kA - kA is not too large is "k-isomorphic" to a sub
From playlist Introduction to Additive Combinatorics (Cambridge Part III course)
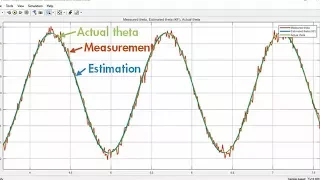
How to Use a Kalman Filter in Simulink | Understanding Kalman Filters, Part 6
Download our Kalman Filter Virtual Lab to practice linear and extended Kalman filter design of a pendulum system with interactive exercises and animations in MATLAB and Simulink: https://bit.ly/3g5AwyS This video demonstrates how you can estimate the angular position of a simple pendulum
From playlist Understanding Kalman Filters

Bertrand Eynard - An overview of the topological recursion
The "topological recursion" defines a double family of "invariants" $W_{g,n}$ associated to a "spectral curve" (which we shall define). The invariants $W_{g,n}$ are meromorphic $n$-forms defined by a universal recursion relation on $|\chi|=2g-2+n$, the initial terms $W_{0,1}$
From playlist Physique mathématique des nombres de Hurwitz pour débutants
How to Implement a Kalman Filter in Simulink
This video demonstrates how you can estimate position using a Kalman filter in Simulink. Using MATLAB and Simulink, you can implement linear time-invariant or time-varying Kalman filters. In this video, a inverted pendulum system is modeled in Simulink using Simscape Multibody™. The angl
From playlist “How To” with MATLAB and Simulink

卡尔曼滤波器是一种优化估算算法,在不确定和间接测量的情况下估算系统状态。 观看视频示例,了解卡尔曼滤波器背后的工作原理。在本视频中你将学习如何配置卡尔曼滤波器模块参数,例如系统模型、初始状态估计和噪声特性,使用Simulink中的卡尔曼滤波器估算单摆模型角度。 使用 MATLAB 和 Simulink 设计和使用卡尔曼滤波器:https://bit.ly/2GXwjxG 了解 Control System Toolbox:https://bit.ly/2BWJECb 获取免费试用版,30 天探索触手可及:https://bit.ly/2IPvqcc 观看更多 MATLA
From playlist 卡尔曼滤波器(Kalman Filters)
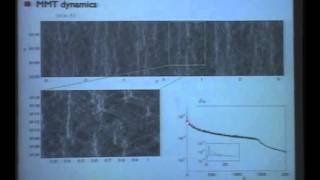
Data Driven Methods for Complex Turbulent Systems ( 3 ) - Andrew J. Majda
Lecture 3: Data Driven Methods for Complex Turbulent Systems Abstract: An important contemporary research topic is the development of physics constrained data driven methods for complex, large-dimensional turbulent systems such as the equations for climate change science. Three new approa
From playlist Mathematical Perspectives on Clouds, Climate, and Tropical Meteorology

Stability of the optimal nonlinear filter - Oljaca - Workshop 2 - CEB T3 2019
Oljaca (U Reading, UK) / 15.11.2019 Stability of the optimal nonlinear filter ---------------------------------- Vous pouvez nous rejoindre sur les réseaux sociaux pour suivre nos actualités. Facebook : https://www.facebook.com/InstitutHenriPoincare/ Twitter : https://twitter.com
From playlist 2019 - T3 - The Mathematics of Climate and the Environment
Lec 16 | MIT 18.085 Computational Science and Engineering I
Dynamic estimation: Kalman filter and square root filter A more recent version of this course is available at: http://ocw.mit.edu/18-085f08 License: Creative Commons BY-NC-SA More information at http://ocw.mit.edu/terms More courses at http://ocw.mit.edu
From playlist MIT 18.085 Computational Science & Engineering I, Fall 2007
How to Use an Extended Kalman Filter in Simulink | Understanding Kalman Filters, Part 7
Download our Kalman Filter Virtual Lab to practice linear and extended Kalman filter design of a pendulum system with interactive exercises and animations in MATLAB and Simulink: https://bit.ly/3g5AwyS This video demonstrates how you can estimate the angular position of a nonlinear pendul
From playlist Understanding Kalman Filters

Clément Maria (10/23/19): Parameterized complexity of quantum invariants of knots
Title: Parameterized complexity of quantum invariants of knots Abstract: We give a general fixed parameter tractable algorithm to compute quantum invariants of knots presented by diagrams, whose complexity is singly exponential in the carving-width (or the tree-width) of the knot diagram.
From playlist AATRN 2019
Transversality and super-rigidity in Gromov-Witten Theory by Chris Wendl
J-Holomorphic Curves and Gromov-Witten Invariants DATE:25 December 2017 to 04 January 2018 VENUE:Madhava Lecture Hall, ICTS, Bangalore Holomorphic curves are a central object of study in complex algebraic geometry. Such curves are meaningful even when the target has an almost complex stru
From playlist J-Holomorphic Curves and Gromov-Witten Invariants

Nonlinear State Estimators | Understanding Kalman Filters, Part 5
Download our Kalman Filter Virtual Lab to practice linear and extended Kalman filter design of a pendulum system with interactive exercises and animations in MATLAB and Simulink: https://bit.ly/3g5AwyS This video explains the basic concepts behind nonlinear state estimators, including ext
From playlist Understanding Kalman Filters

Probabilistic Numerics — moving BayesOpt expertise to the inner loop by Philipp Hennig
A Google TechTalk, presented by Philipp Hennig, 2022/02/08 ABSTRACT: BayesOpt Speaker Series. Bayesian Optimization experts are Gaussian process experts. And there is much more to do for Gaussian inference in the algorithmic space beyond outer-loop optimization. Using simulation — the solu
From playlist Google BayesOpt Speaker Series 2021-2022

卡尔曼滤波器是一种优化估算算法,在不确定和间接测量的情况下估算系统状态。 观看视频示例,了解卡尔曼滤波器背后的工作原理。本视频解释了非线性状态估算器背后的基本概念,包括扩展卡尔曼滤波器,无味卡尔曼滤波器和粒子滤波器。 使用 MATLAB 和 Simulink 设计和使用卡尔曼滤波器:https://bit.ly/2GXwjxG 了解 Control System Toolbox:https://bit.ly/2BWJECb 获取免费试用版,30 天探索触手可及:https://bit.ly/2IPvqcc 观看更多 MATLAB 和 Simulink 入门视频:http
From playlist 卡尔曼滤波器(Kalman Filters)

Lagrangian Floer theory by Sushmita Venugopalan
J-Holomorphic Curves and Gromov-Witten Invariants DATE:25 December 2017 to 04 January 2018 VENUE:Madhava Lecture Hall, ICTS, Bangalore Holomorphic curves are a central object of study in complex algebraic geometry. Such curves are meaningful even when the target has an almost complex stru
From playlist J-Holomorphic Curves and Gromov-Witten Invariants