Control theory | Artificial neural networks
Feed forward (control)
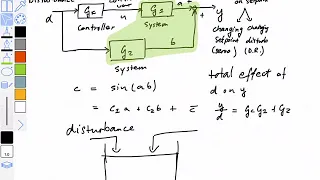
A feed forward (sometimes written feedforward) is an element or pathway within a control system that passes a controlling signal from a source in its external environment to a load elsewhere in its external environment. This is often a command signal from an external operator. A control system which has only feed-forward behavior responds to its control signal in a pre-defined way without responding to the way the load reacts; it is in contrast with a system that also has feedback, which adjusts the input to take account of how it affects the load, and how the load itself may vary unpredictably; the load is considered to belong to the external environment of the system. In a feed-forward system, the control variable adjustment is not error-based. Instead it is based on knowledge about the process in the form of a mathematical model of the process and knowledge about, or measurements of, the process disturbances. Some prerequisites are needed for control scheme to be reliable by pure feed-forward without feedback: the external command or controlling signal must be available, and the effect of the output of the system on the load should be known (that usually means that the load must be predictably unchanging with time). Sometimes pure feed-forward control without feedback is called 'ballistic', because once a control signal has been sent, it cannot be further adjusted; any corrective adjustment must be by way of a new control signal. In contrast, 'cruise control' adjusts the output in response to the load that it encounters, by a feedback mechanism. These systems could relate to control theory, physiology, or computing. (Wikipedia).