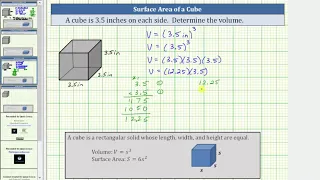
Determine the Volume of a Cube (Decimals)
This video explains how to determine the volume of a rectangular cube. http://mathispower4u.com
From playlist Volume and Surface Area (Geometry)
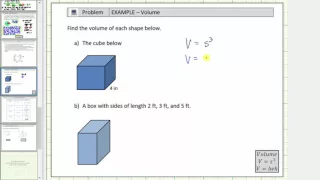
This video introduces volume and shows how to determine the volume of a cube and rectangular solid. http://mathispower4u.com
From playlist Volume and Surface Area (Geometry)

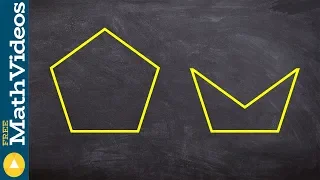
What is the difference between convex and concave
👉 Learn about polygons and how to classify them. A polygon is a plane shape bounded by a finite chain of straight lines. A polygon can be concave or convex and it can also be regular or irregular. A concave polygon is a polygon in which at least one of its interior angles is greater than 1
From playlist Classify Polygons
What is the difference between convex and concave polygons
👉 Learn about polygons and how to classify them. A polygon is a plane shape bounded by a finite chain of straight lines. A polygon can be concave or convex and it can also be regular or irregular. A concave polygon is a polygon in which at least one of its interior angles is greater than 1
From playlist Classify Polygons

👉 Learn about polygons and how to classify them. A polygon is a plane shape bounded by a finite chain of straight lines. A polygon can be concave or convex and it can also be regular or irregular. A concave polygon is a polygon in which at least one of its interior angles is greater than 1
From playlist Classify Polygons

Another practice problem dealing with the volume of a sphere
From playlist Middle School - Worked Examples

Nearly Optimal Deterministic Algorithms Via M-Ellipsoids - Santosh Vempala
Santosh Vempala Georgia Institute of Technology January 30, 2011 Milman's ellipsoids play an important role in modern convex geometry. Here we show that their proofs of existence can be turned into efficient algorithms, and these in turn lead to improved deterministic algorithms for volume
From playlist Mathematics
Lecture 12 | Convex Optimization I (Stanford)
Professor Stephen Boyd, of the Stanford University Electrical Engineering department, lectures on geometric problems in the context of electrical engineering and convex optimization for the course, Convex Optimization I (EE 364A). Convex Optimization I concentrates on recognizing and so
From playlist Lecture Collection | Convex Optimization
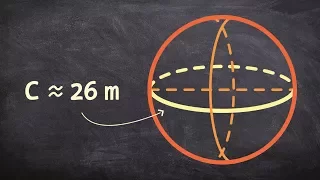
Find the volume of a sphere given the circumference
👉 Learn how to find the volume and the surface area of a sphere. A sphere is a perfectly round 3-dimensional object. It is an object with the shape of a round ball. The distance from the center of a sphere to any point on its surface is called the radius of the sphere. A sphere has a unifo
From playlist Volume and Surface Area
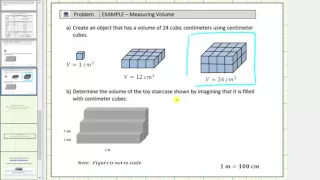
This video provides a basic introduction to volume.
From playlist Volume and Surface Area (Geometry)

Peter Pivovarov: Random s-concave functions and isoperimetry
I will discuss stochastic geometry of s-concave functions. In particular, I will explain how a ”local” stochastic isoperimetry underlies several functional inequalities. A new ingredient is a notion of shadow systems for s-concave functions. Based on joint works with J. Rebollo Bueno.
From playlist Workshop: High dimensional spatial random systems

Haotian Jiang: Minimizing Convex Functions with Integral Minimizers
Given a separation oracle SO for a convex function f that has an integral minimizer inside a box with radius R, we show how to find an exact minimizer of f using at most • O(n(n + log(R))) calls to SO and poly(n,log(R)) arithmetic operations, or • O(nlog(nR)) calls to SO and exp(O(n)) · po
From playlist Workshop: Continuous approaches to discrete optimization

Calculus 1 Lecture 5.2 Part 3: Finding the Volume of a Solid of Revolution Using Disks or Washers.
From playlist Calculus 1 Playlist 2

Reducing Isotropy to KLS: An Almost Cubic Volume Algorithm by Santosh Vempala
Program Advances in Applied Probability II (ONLINE) ORGANIZERS: Vivek S Borkar (IIT Bombay, India), Sandeep Juneja (TIFR Mumbai, India), Kavita Ramanan (Brown University, Rhode Island), Devavrat Shah (MIT, US) and Piyush Srivastava (TIFR Mumbai, India) DATE: 04 January 2021 to 08 Januar
From playlist Advances in Applied Probability II (Online)

Santosh Vempala: Reducing Isotropy to KLS: An Almost Cubic Volume Algorithm
Computing the volume of a convex body is an ancient problem whose study has led to many interesting mathematical developments. In the most general setting, the convex body is given only by a membership oracle. In this talk, we present a faster algorithm for isotropic transformation of an a
From playlist Workshop: High dimensional measures: geometric and probabilistic aspects

Bo'az Klartag - Convexity in High Dimensions I
October 28, 2022 This is the first talk in the Minerva Mini-course of Bo'az Klartag, Weizmann Institute of Science and Princeton's Fall 2022 Minerva Distinguished Visitor We will discuss recent progress in the understanding of the isoperimetric problem for high-dimensional convex sets, an
From playlist Minerva Mini Course - Bo'az Klartag

From playlist Contributed talks One World Symposium 2020

Ex: Determine Volume of a Cone
This video provides an example of how to determine the volume of a cone. Complete Video Library at http://wwwmathispower4u.com Search the Library at http://www.mathispower4u.wordpress.com
From playlist Volume and Surface Area (Geometry)
GPDE Workshop - Synthetic formulations - Cedric Villani
Cedric Villani IAS/ENS-France February 23, 2009 For more videos, visit http://video.ias.edu
From playlist Mathematics