
👉 Learn about polygons and how to classify them. A polygon is a plane shape bounded by a finite chain of straight lines. A polygon can be concave or convex and it can also be regular or irregular. A concave polygon is a polygon in which at least one of its interior angles is greater than 1
From playlist Classify Polygons
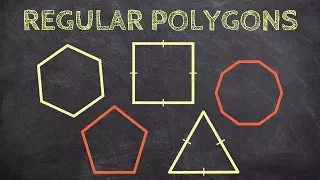
What is the definition of a regular polygon and how do you find the interior angles
👉 Learn about polygons and how to classify them. A polygon is a plane shape bounded by a finite chain of straight lines. A polygon can be concave or convex and it can also be regular or irregular. A concave polygon is a polygon in which at least one of its interior angles is greater than 1
From playlist Classify Polygons
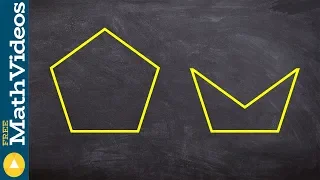
What is the difference between convex and concave polygons
👉 Learn about polygons and how to classify them. A polygon is a plane shape bounded by a finite chain of straight lines. A polygon can be concave or convex and it can also be regular or irregular. A concave polygon is a polygon in which at least one of its interior angles is greater than 1
From playlist Classify Polygons

What is the difference between convex and concave
👉 Learn about polygons and how to classify them. A polygon is a plane shape bounded by a finite chain of straight lines. A polygon can be concave or convex and it can also be regular or irregular. A concave polygon is a polygon in which at least one of its interior angles is greater than 1
From playlist Classify Polygons

Teach Astronomy - The Shape of Space
http://www.teachastronomy.com/ According to the theory of general relativity, the universe and the space we live in may actually have a shape, and the shape need not be the flat infinite space described by Euclidean geometry. Infinite space will be flat, but curved space could be finite o
From playlist 22. The Big Bang, Inflation, and General Cosmology
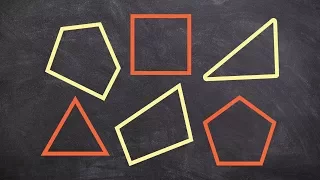
What is the difference between a regular and irregular polygon
👉 Learn about polygons and how to classify them. A polygon is a plane shape bounded by a finite chain of straight lines. A polygon can be concave or convex and it can also be regular or irregular. A concave polygon is a polygon in which at least one of its interior angles is greater than 1
From playlist Classify Polygons

From playlist Contributed talks One World Symposium 2020

Lecture 1 | Random polytopes | Zakhar Kabluchko | EIMI
Online school "Randomness online" November 4 – 8, 2020 https://indico.eimi.ru/event/40/
From playlist Talks of Mathematics Münster's reseachers

👉 Learn about polygons and how to classify them. A polygon is a plane shape bounded by a finite chain of straight lines. A polygon can be concave or convex and it can also be regular or irregular. A concave polygon is a polygon in which at least one of its interior angles is greater than 1
From playlist Classify Polygons
Determine if a polygon is concave or convex ex 2
👉 Learn about polygons and how to classify them. A polygon is a plane shape bounded by a finite chain of straight lines. A polygon can be concave or convex and it can also be regular or irregular. A concave polygon is a polygon in which at least one of its interior angles is greater than 1
From playlist Classify Polygons

Whitney numbers via measure concentration in representation varieties - Karim Adiprasito
Karim Adiprasito Member, School of Mathematics March 3, 2015 We provide a simple proof of the Rota--Heron--Welsh conjecture for matroids realizable as c-arrangements in the sense of Goresky--MacPherson: we prove that the coefficients of the characteristic polynomial of the associated matr
From playlist Mathematics
What is the difference between a regular and irregular polygons
👉 Learn about polygons and how to classify them. A polygon is a plane shape bounded by a finite chain of straight lines. A polygon can be concave or convex and it can also be regular or irregular. A concave polygon is a polygon in which at least one of its interior angles is greater than 1
From playlist Classify Polygons
Christiane Tretter: New spectral bounds for damped systems
Abstract: In this talk new enclosures for the spectra of operators associated with second order Cauchy problems are presented for non-selfadjoint damping. Our new results yield much better bounds than the numerical range of these non-selfadjoint operators for both uniformly accretive and s
From playlist Analysis and its Applications

Codina Cotar: Disorder relevance for non-convex random gradient Gibbs measures in d ≤ 2
HYBRID EVENT Recorded during the meeting " Probability/PDE Interactions: Interface Models and Particle Systems " the April 28, 2022 by the Centre International de Rencontres Mathématiques (Marseille, France) Filmmaker: Guillaume Hennenfent Find this video and other talks given by world
From playlist Probability and Statistics

On minimizers and critical points for anisotropic isoperimetric problems - Robin Neumayer
Variational Methods in Geometry Seminar Topic: On minimizers and critical points for anisotropic isoperimetric problems Speaker: Robin Neumayer Affiliation: Member, School of Mathematics Date: February 19, 2019 For more video please visit http://video.ias.edu
From playlist Variational Methods in Geometry

Ahlfors-Bers 2014 "Quasi-isometric rigidity of the class of convex-cocompact Kleinian groups"
Peter Haïssinsky (Toulouse): The talk will be devoted to discussing background and ingredients for the proof of the following theorem: a finitely generated group quasi-isometric to a convex-cocompact Kleinian group contains a finite index subgroup isomorphic to a convex-cocompact Kleinian
From playlist The Ahlfors-Bers Colloquium 2014 at Yale

Jia-Kun Liu (7/26/22): Some applications of optimal transportation
Abstract: In this talk, we will introduce some interesting applications of optimal transportation in various fields including a reconstruction problem in cosmology; a brief proof of isoperimetric inequality in geometry; and an application in image recognition relating to a transport betwee
From playlist Applied Geometry for Data Sciences 2022

Emanuel Milman: 1 D Localization part 4
The lecture was held within the framework of the Hausdorff Trimester Program: Optimal Transportation and the Workshop: Winter School & Workshop: New developments in Optimal Transport, Geometry and Analysis
From playlist HIM Lectures 2015
👉 Learn about polygons and how to classify them. A polygon is a plane shape bounded by a finite chain of straight lines. A polygon can be concave or convex and it can also be regular or irregular. A concave polygon is a polygon in which at least one of its interior angles is greater than 1
From playlist Classify Polygons