
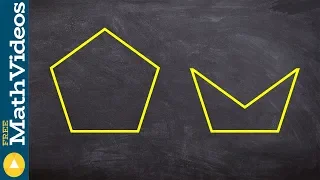
What is the difference between convex and concave
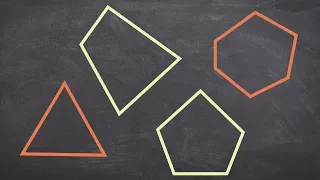
👉 Learn about polygons and how to classify them. A polygon is a plane shape bounded by a finite chain of straight lines. A polygon can be concave or convex and it can also be regular or irregular. A concave polygon is a polygon in which at least one of its interior angles is greater than 1
From playlist Classify Polygons
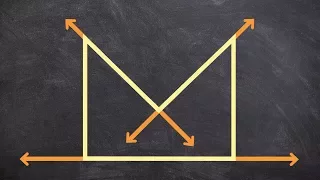
What is the difference between convex and concave polygons
👉 Learn about polygons and how to classify them. A polygon is a plane shape bounded by a finite chain of straight lines. A polygon can be concave or convex and it can also be regular or irregular. A concave polygon is a polygon in which at least one of its interior angles is greater than 1
From playlist Classify Polygons
👉 Learn about polygons and how to classify them. A polygon is a plane shape bounded by a finite chain of straight lines. A polygon can be concave or convex and it can also be regular or irregular. A concave polygon is a polygon in which at least one of its interior angles is greater than 1
From playlist Classify Polygons

👉 Learn about polygons and how to classify them. A polygon is a plane shape bounded by a finite chain of straight lines. A polygon can be concave or convex and it can also be regular or irregular. A concave polygon is a polygon in which at least one of its interior angles is greater than 1
From playlist Classify Polygons

What is the difference between concave and convex polygons
👉 Learn about polygons and how to classify them. A polygon is a plane shape bounded by a finite chain of straight lines. A polygon can be concave or convex and it can also be regular or irregular. A concave polygon is a polygon in which at least one of its interior angles is greater than 1
From playlist Classify Polygons
Determine if a polygon is concave or convex ex 2
👉 Learn about polygons and how to classify them. A polygon is a plane shape bounded by a finite chain of straight lines. A polygon can be concave or convex and it can also be regular or irregular. A concave polygon is a polygon in which at least one of its interior angles is greater than 1
From playlist Classify Polygons
What is the difference between a regular and irregular polygon
👉 Learn about polygons and how to classify them. A polygon is a plane shape bounded by a finite chain of straight lines. A polygon can be concave or convex and it can also be regular or irregular. A concave polygon is a polygon in which at least one of its interior angles is greater than 1
From playlist Classify Polygons

Stability of the set of quantum states - S. Weis - Workshop 2 - CEB T3 2017
Stephan Weis / 26.10.17 Stability of the set of quantum states A convex set C is stable if the midpoint map (x,y) - (x+y)/2 is open. For compact C the Vesterstrøm–O’Brien theorem asserts that C is stable if and only if the barycentric map from the set of all Borel probability measures to
From playlist 2017 - T3 - Analysis in Quantum Information Theory - CEB Trimester

Lecture 15 | Convex Optimization II (Stanford)
Lecture by Professor Stephen Boyd for Convex Optimization II (EE 364B) in the Stanford Electrical Engineering department. Professor Boyd continues lecturing on L1 Methods for Convex-Cardinality Problems. This course introduces topics such as subgradient, cutting-plane, and ellipsoid met
From playlist Lecture Collection | Convex Optimization

Jia-Kun Liu (7/26/22): Some applications of optimal transportation
Abstract: In this talk, we will introduce some interesting applications of optimal transportation in various fields including a reconstruction problem in cosmology; a brief proof of isoperimetric inequality in geometry; and an application in image recognition relating to a transport betwee
From playlist Applied Geometry for Data Sciences 2022

Nonconvex Minimax Optimization - Chi Ji
Seminar on Theoretical Machine Learning Topic: Nonconvex Minimax Optimization Speaker: Chi Ji Affiliation: Princeton University; Member, School of Mathematics Date: November 20, 2019 For more video please visit http://video.ias.edu
From playlist Mathematics
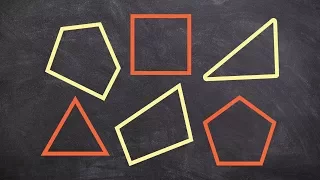
What are four types of polygons
👉 Learn about polygons and how to classify them. A polygon is a plane shape bounded by a finite chain of straight lines. A polygon can be concave or convex and it can also be regular or irregular. A concave polygon is a polygon in which at least one of its interior angles is greater than 1
From playlist Classify Polygons

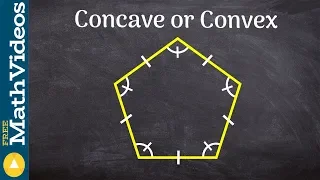
How to determine if a polygon is concave, convex, regular or irregular
👉 Learn about polygons and how to classify them. A polygon is a plane shape bounded by a finite chain of straight lines. A polygon can be concave or convex and it can also be regular or irregular. A concave polygon is a polygon in which at least one of its interior angles is greater than 1
From playlist Classify Polygons

Parvaneh Joharinad (7/27/22): Curvature of data
Abstract: How can one determine the curvature of data and how does it help to derive the salient structural features of a data set? After determining the appropriate model to represent data, the next step is to derive the salient structural features of data based on the tools available for
From playlist Applied Geometry for Data Sciences 2022

Computing Delaunay complex: Lifting to a paraboloid [Ondřej Draganov]
Short visual explanation of a construction of Delaunay complex via lifting to a paraboloid and projecting. This construction reduces the problem of finding the Delaunay complex of a d-dimensional point cloud to finding a lower convex hull of a (d+1)-dimensional point cloud. This video is
From playlist Tutorial-a-thon 2021 Fall

Kolja Knauer : Posets, polynômes, et polytopes - Partie 2
Résumé : Les posets (ensembles partiellement ordonnés) sont des structures utiles pour la modélisation de divers problèmes (scheduling, sous-groupes d'un groupe), mais ils sont aussi la base d'une théorie combinatoire très riche. Nous discuterons des paramètres de posets comme la largeur,
From playlist Combinatorics

Rasmus Kyng: A numerical analysis approach to convex optimization
In convex optimization, we can usually obtain O(1)-approximate solutions much faster than high accuracy (1 + 1/poly(n))-approximate solutions. One major exception is L2-regression, where low accuracy algorithms can be converted into high-accuracy ones via iterative refinement. I will prese
From playlist Workshop: Continuous approaches to discrete optimization

Emanuel Milman: Functional Inequalities on sub-Riemannian manifolds via QCD
We are interested in obtaining Poincar ́e and log-Sobolev inequalities on domains in sub-Riemannian manifolds (equipped with their natural sub-Riemannian metric and volume measure). It is well-known that strictly sub-Riemannian manifolds do not satisfy any type of Curvature-Dimension condi
From playlist Workshop: High dimensional measures: geometric and probabilistic aspects
What is the difference between a regular and irregular polygons
👉 Learn about polygons and how to classify them. A polygon is a plane shape bounded by a finite chain of straight lines. A polygon can be concave or convex and it can also be regular or irregular. A concave polygon is a polygon in which at least one of its interior angles is greater than 1
From playlist Classify Polygons

Daniel Kuhn: "Wasserstein Distributionally Robust Optimization: Theory and Applications in Machi..."
Intersections between Control, Learning and Optimization 2020 "Wasserstein Distributionally Robust Optimization: Theory and Applications in Machine Learning" Daniel Kuhn - École Polytechnique Fédérale de Lausanne (EPFL) Abstract: Many decision problems in science, engineering and economi
From playlist Intersections between Control, Learning and Optimization 2020